
Nie jest już aktywnie utrzymywany.
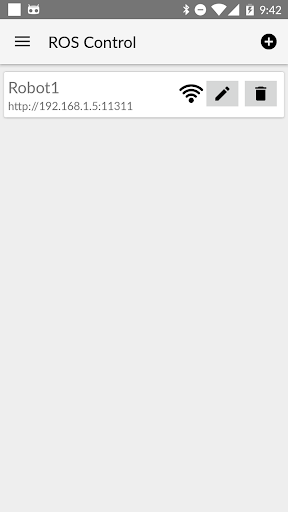
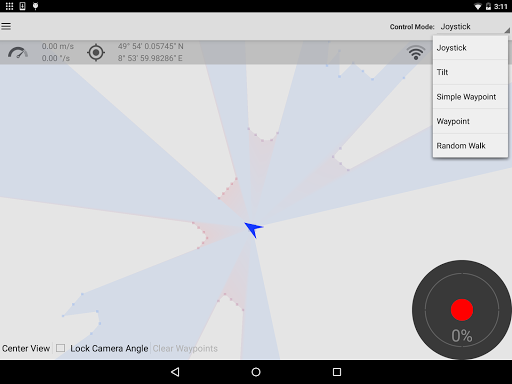
Pilot zdalnego sterowania, polecenie i wizualizuj dane czujnika w czasie rzeczywistym z robotów mobilnych działających na systemie robotów (ROS) przy użyciu Rosy Control.
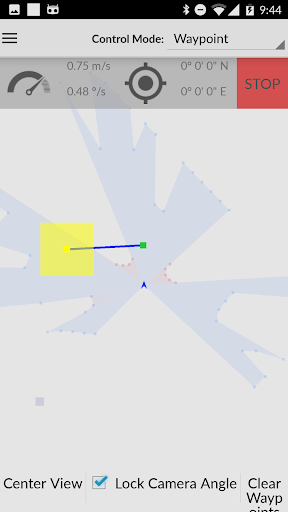
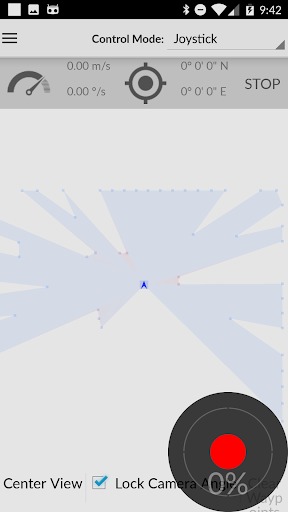
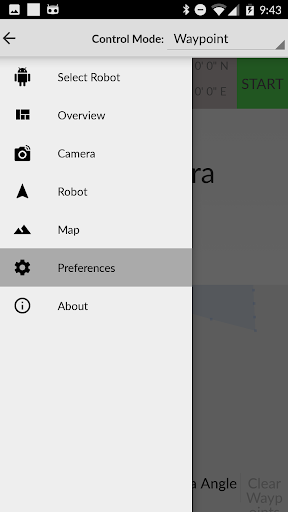
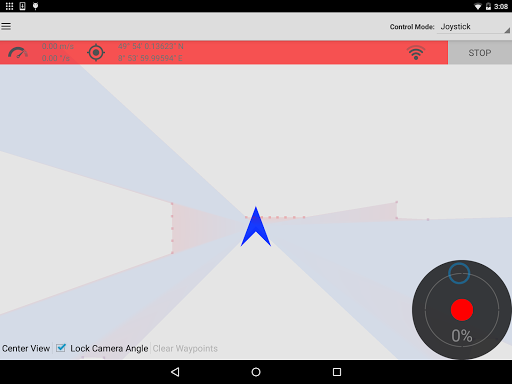
- Wiele opcji kontroli teleoptowania, w tym joystick and tilt Control
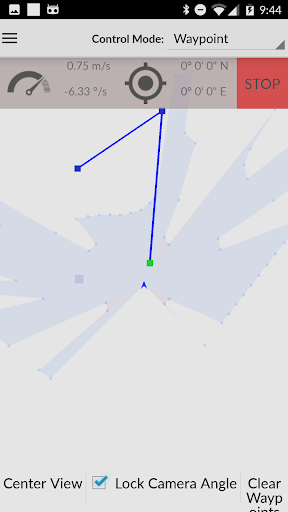
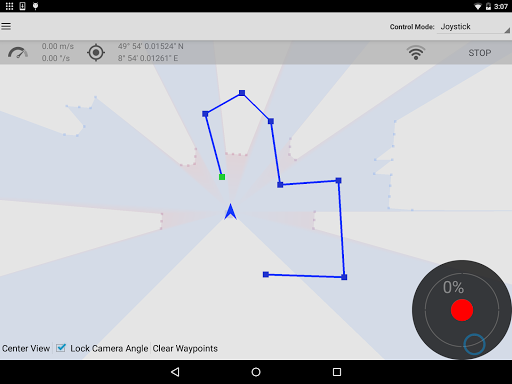
- Waypoint Planning i nawigacja
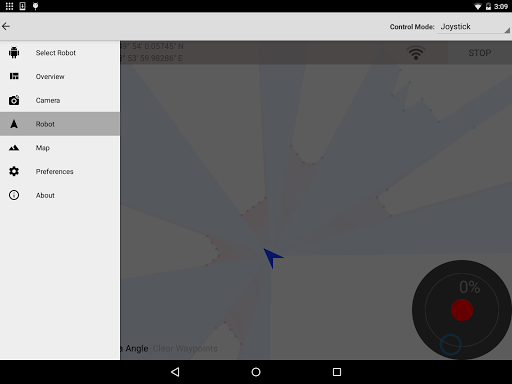
- Zdalny widok aparatu
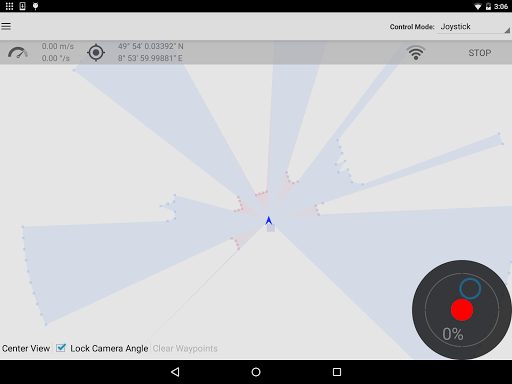
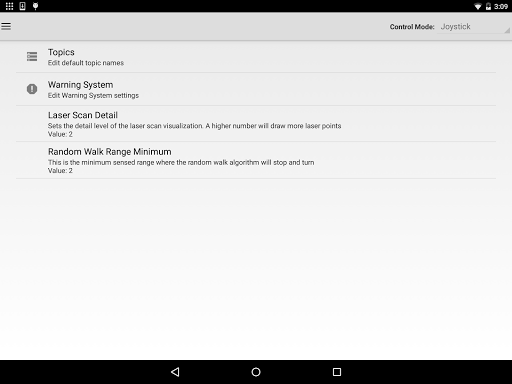
- Wizualizacja skanowania laserowego
- Dane GPS i widok mapy
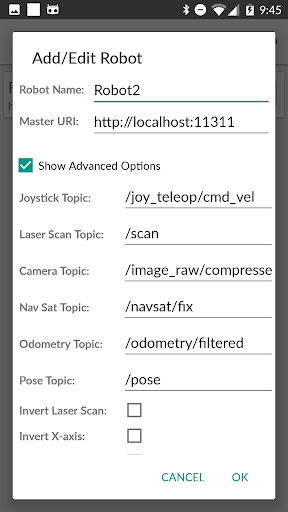
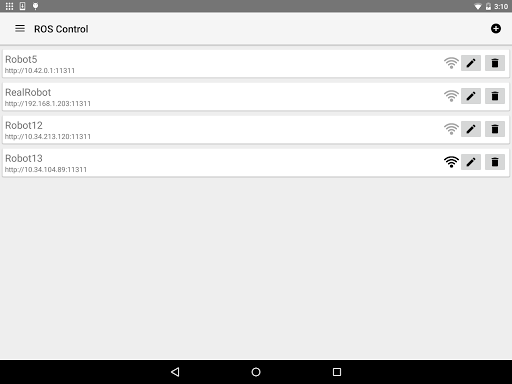
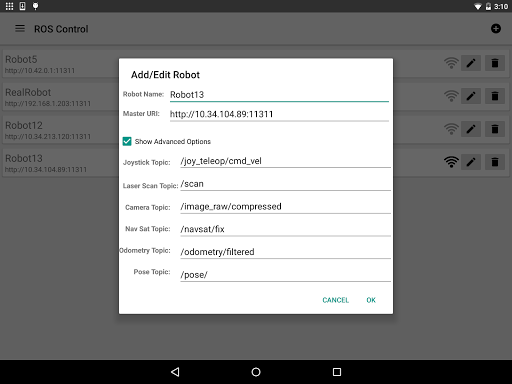
- Savable, konfigurowalny konfiguracja połączeniaDla maksymalnej kompatybilności między robotami
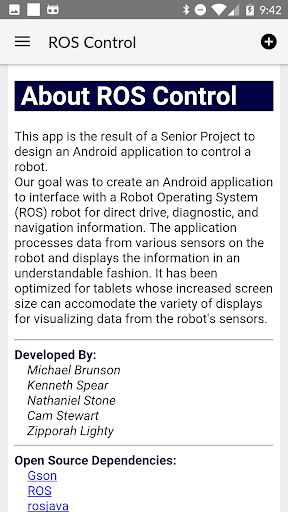
dla programistów:
Zapraszamy do przyczynienia się do tej aplikacji!
Kod źródłowy:
https://github.com/mtbii/robotca
9Apps 4.9



















