
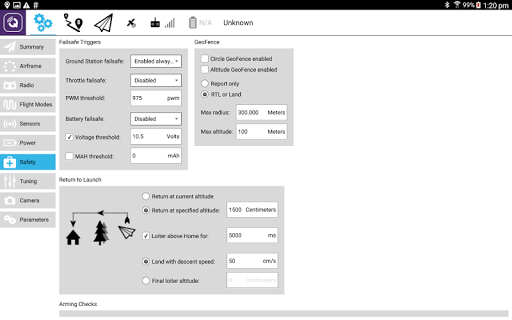
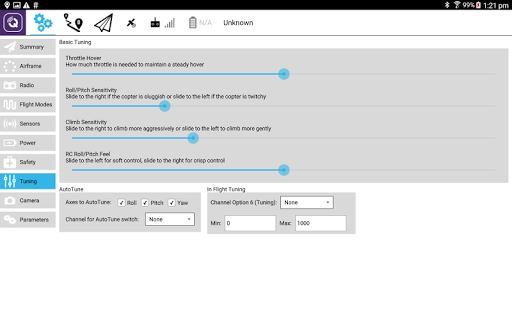
QgroundControl zapewnia pełną kontrolę lotu i konfiguracji dla pojazdów zasilanych Ardupilot lub PX4 PRO. Cel dla QGRGROUSCONTROL jest lepsza łatwość obsługi dla nowych użytkowników, a także obsługę funkcji High End dla doświadczonych użytkowników.
QGRIGERControl Cechy:
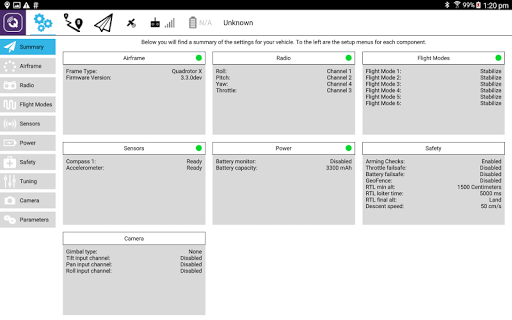
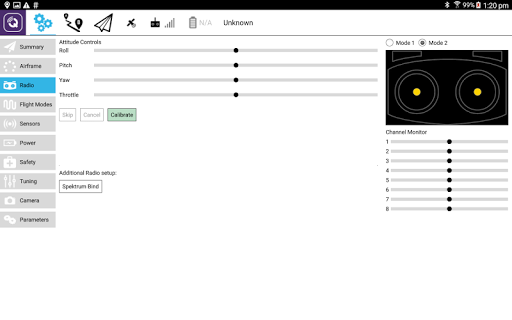
- pełna obsługa konfiguracji pojazdów Running PX4 Pro i Ardupilot (Arducopter, Arduplane, Ardurover, Ardusub) Firmware
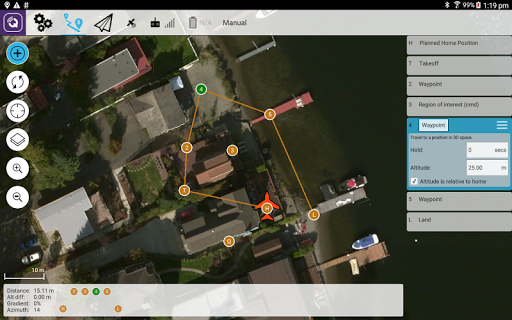
- Planowanie misji dla autonomicznego lotu
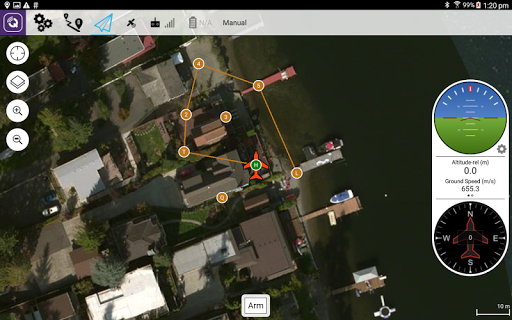
- Wyświetlanie mapy lotu Pozycja pojazdu, ścieżka lotów, punkty drogi i instrumenty pojazdów
- strumieniowanie wideo z nakładkami na instrumencie
- obsługa lotu dla każdego pojazdu MAVLINK
QGrignControl jest również dostępny dla Windows, MacOS, Linux i IOS.
Uwagi dotyczące wydania
QGRGROUNDControl Oficjalna strona
Dokumentacja
Wsparcie





9Apps 4.9














