
Artık aktif olarak tutulmaz.
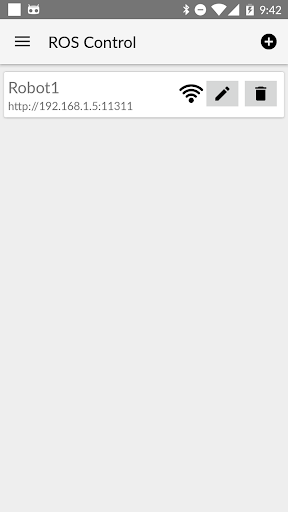
Uzaktan Kumanda, Komuta ve ROS Control Kullanarak Robot İşletim Sisteminde (ROS) çalışan mobil robotlardan gerçek zamanlı sensör verilerini görselleştirin.
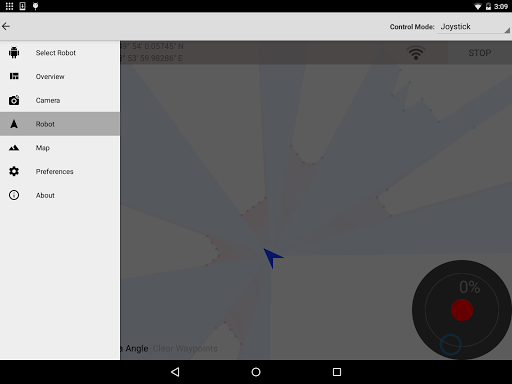
Özellikler:
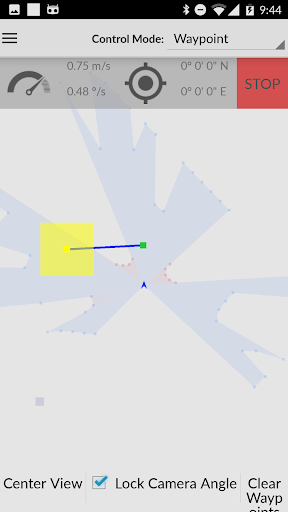
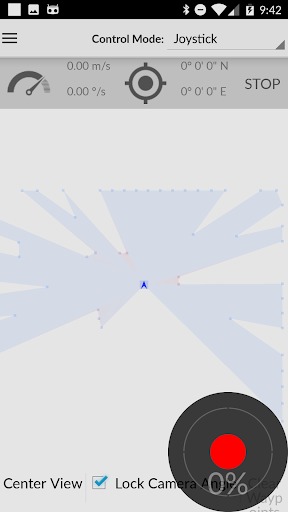
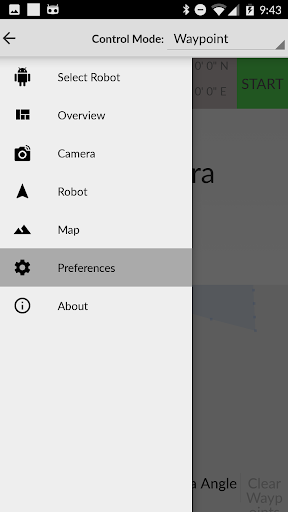
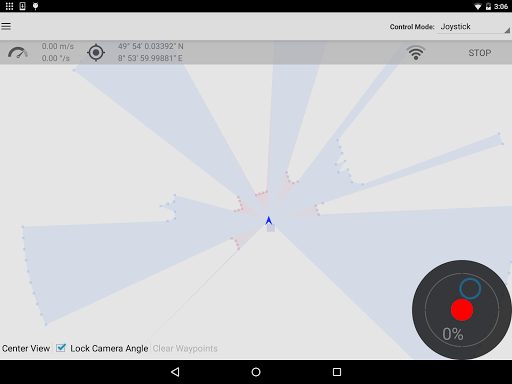
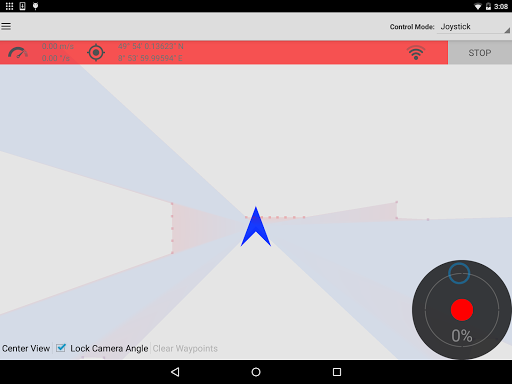
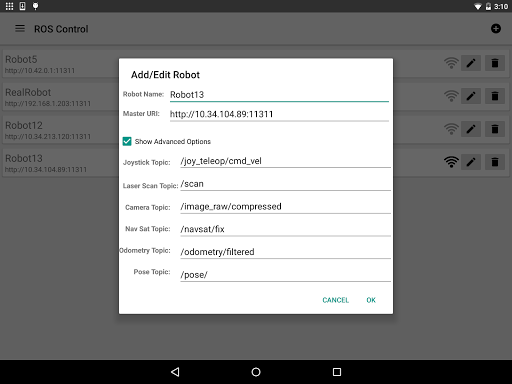
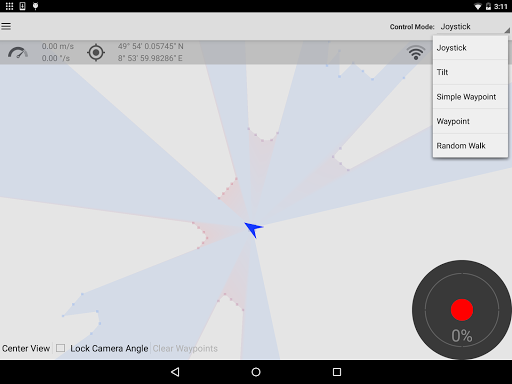
- Joystick ve Tilt Kontrolü dahil olmak üzere birden fazla teleoperasyon kontrolü seçenekleri
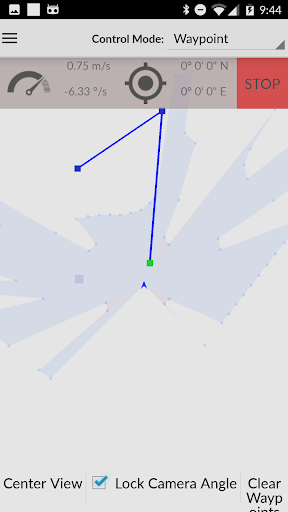
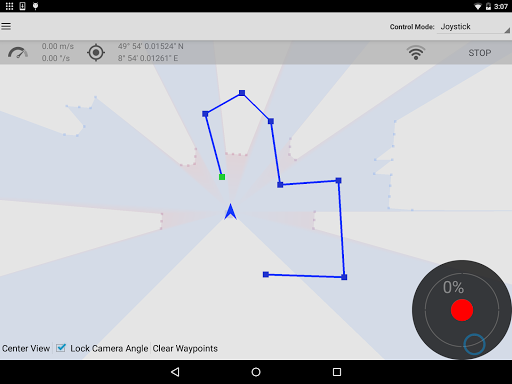
- Yol noktası planlama ve navigasyon
- Uzaktan kamera görünümü
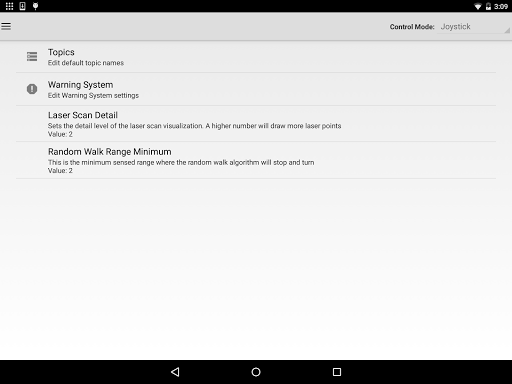
- Lazer taraması Görselleştirme
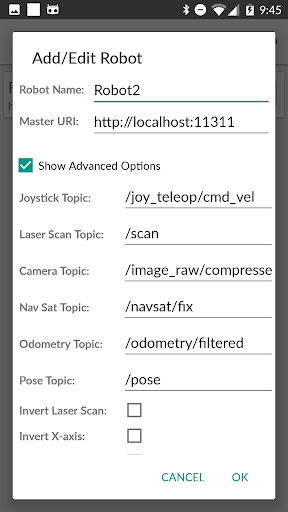
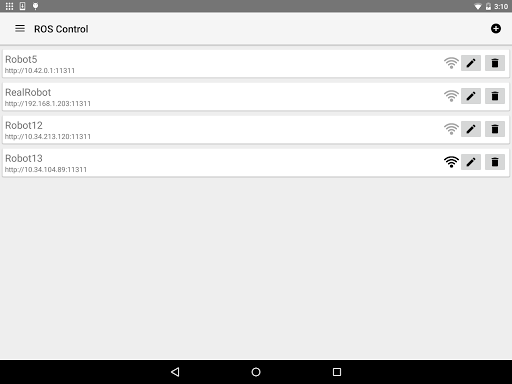
- GPS veri ve harita görünümünü görüntüle - Tasarruflu, Yapılandırılabilir bağlantı kurulumuRobotlar arasında maksimum uyumluluk için
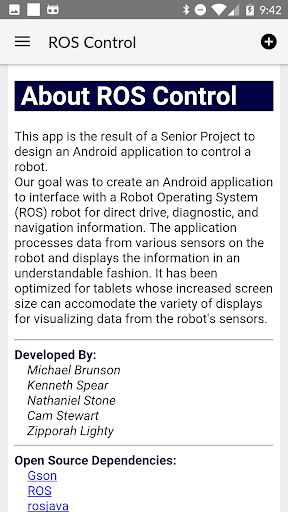
geliştiriciler için:
Bu uygulamaya katkıda bulunmaktan çekinmeyin!
Kaynak kodu:
https://github.com/mtbii/robotca
9Apps 4.9























