
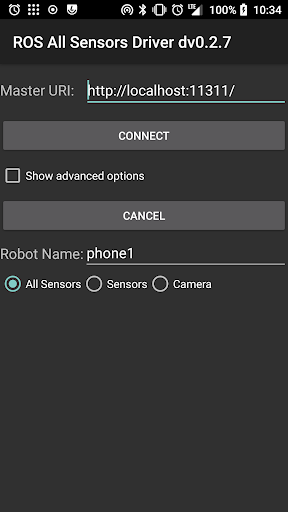
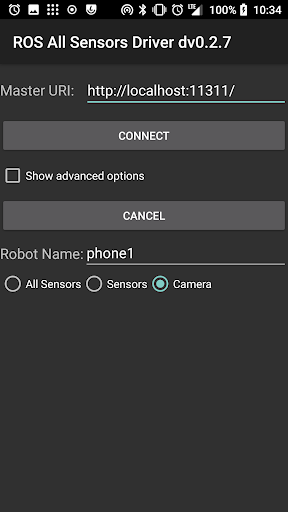
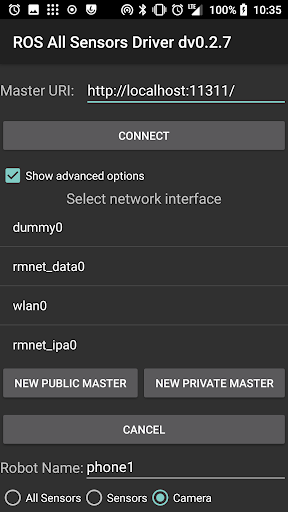
電話/タブレットセンサーの送信ROS
OpenCV Managerを必要としていません。
コンピュータのROSCOREを使用してROS_IP環境変数をコンピュータに設定します。
電話が接続されている場合電話からメッセージを受信することはできません。携帯電話のHotSpotのWiFiにコンピュータを接続してください。 (あなた自身のルータを持つ同じWiFiネットワークではありません)。
Wiki
v0.2.8
- QRボタンを削除します。
v0.2.7
- 新しい電話とタブレットのサポートを追加します。
- OpenCVマネージャを必要としません。
- カメラとGPSの権限を求める。
v0 .2.6
Raw Image Bug:なし圧縮での不動外での取り出し。アプリのタイトル名へのバージョン番号。
v0.2.4
- タブレットでサポートを追加します。
- 文書を追加します。 (こちらとwikiページ)
v0.2.3
バグの修正:2つ以上の電話機は同じRosore - ネットワーク上でデータを送信できません(異なる名前でさえ)
v0 .2.2
- マージカメラとセンサードライバ。
- OpenCVフレームワークを更新します。 (現在は任意のデバイスで動作します。)
サポート古いデバイスもあります。
- UIにロボット名を追加します。 - コードを配置し、再設計します。
- 早く作業。




9Apps 4.9











