

Rocketは「リモートオープンコントロールキーイネーブルテクノロジー」のためのロケットは、エレクトロニクスホビープロジェクトのための主に意図されたユーザーカスタマイズ可能なリモコンアプリケーションです。
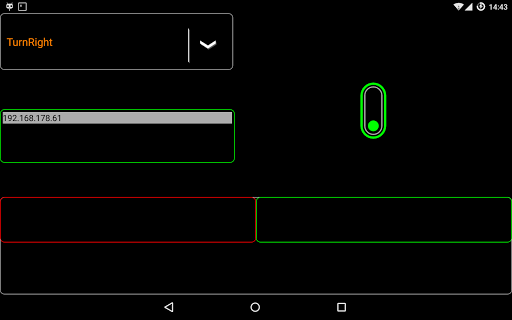
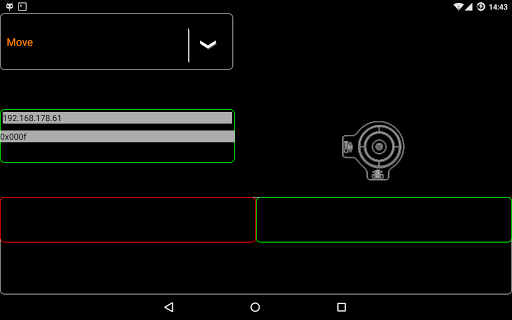
ロケット接続2輪駆動リモコンを介してWiFi(TCP) 。ネットワークは、APモードまたはSTAモードのどちらでもかまいません。アプリを使用すると、すべての移動方向とアームやツールサーボが制御できます。 STAモードでは、あなたの趣味のターゲットは物事のデバイスの実際のインターネットであり、WANとLANを通してリモートで制御することができます。ロケットから送信するすべてのコマンドはテキスト文字列、終了CR(キャリッジリターン)を終了します。
必要な調整とコマンドの解釈はすべて保存され、Pythonで行われます。
おそらくあなたのホビープロジェクトの要件を満たすようにロケットを適応させる必要があるでしょう。その場合、スクリプトと方向変換モジュールの適応に関するPythonの知識が必要になります。
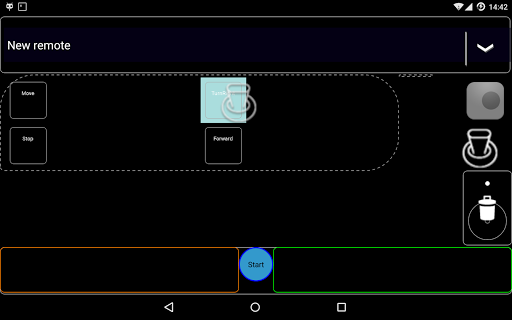
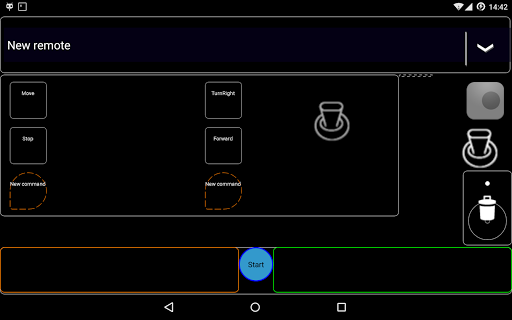
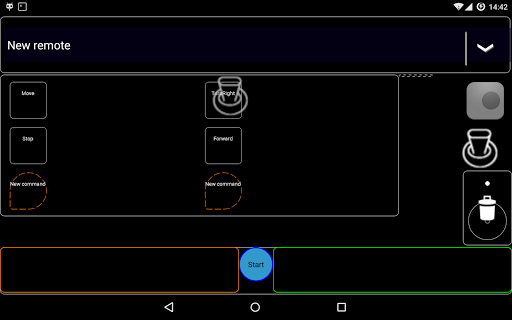
CoreコンポーネントとしてのバンドルWebiopiは、Raspberry PIゼロ、2または3の使用を強制します。ターゲット側。 App画面の各ボタンは、WebIOPIマクロを使用して背後に機能を実現します。
これらのマクロは、Custom Pythons関数がREST APIに自動的にバインドされるため、リモートで呼び出すことができます。それらは、Raspberry PIまたは手動イベントで複雑な計算をリモートでトリガし、複数のGPIOを同時にトリガしたり、デバイス設定を変更したりすることを許可します。
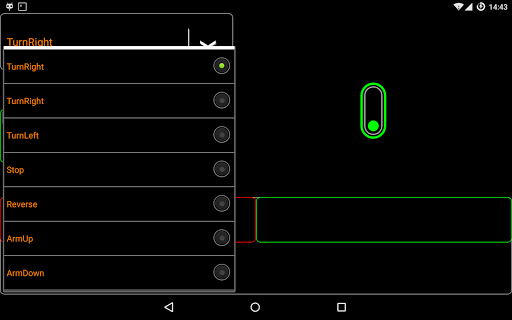
現在の初期リリースでは、ロケットUIは11のハードコード範囲に限定されています。 @ webiopi.macro呼び出し:
worward()、altleft()、reverse()、ターンライト()、停止()、armdown()、tiltup()、tiltdown()、lights()、flashAll()、移動(L、R)。





9Apps 4.9












