







पहले व्यक्ति के दृश्य (एफपीवी), एचयूडी, रिटर्न होम, कोर्स लॉक, होम लॉक, कैमरा जिम्बल, एक्रो मोड, एक्रो 3 डी मोड और अधिक के साथ एक क्वाडकोप्टर / मल्टीरोटर आरसी ड्रोन सिम्युलेटर ..
अब Google कार्डबोर्ड वीआर है इमर्सिव फ्लाइंग और एफपीवी अनुभव के लिए भी समर्थित है।
नियंत्रकों के लिए समर्थन
यह हमारे क्वाडकोप्टरएफएक्स सिम्युलेटर का एक समर्थक संस्करण है। नो-इनएप खरीद नहीं हैं। सब कुछ बहुत कम लागत पर सक्षम है। पहली बार उपयोगकर्ता यह देखने के लिए अपने फ्री क्वाडकोप्टर एफएक्स सिम्युलेटर को आजमा सकते हैं कि क्या हर चीज अच्छी तरह से काम करती है या नहीं।
https://play.google.com/store/apps/details?id=com.creativeworld.quadcopterfx
न्यूनतम स्क्रीन रिज़ॉल्यूशन आवश्यक 800 x 480 पीएक्स है। न्यूनतम अनुशंसित रैम 1 जीबी है हालांकि हमने इसे 512 एमबी रैम पर सफलतापूर्वक चल रहा है। हम सुझावों और समस्याओं के लिए खुले हैं। आप हमेशा हमारे समर्थन ईमेल पर हमें ईमेल कर सकते हैं।
विशेषताएं:
1) क्वाडकोप्टर के वास्तविक भौतिकी मॉडल के आधार पर
2) विभिन्न कैमरों के इंटरएक्टिव चयन मोड:
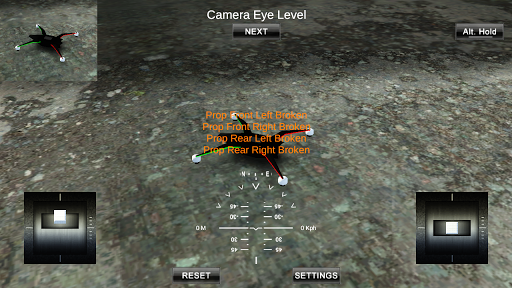
* आंख का स्तर कैमरा
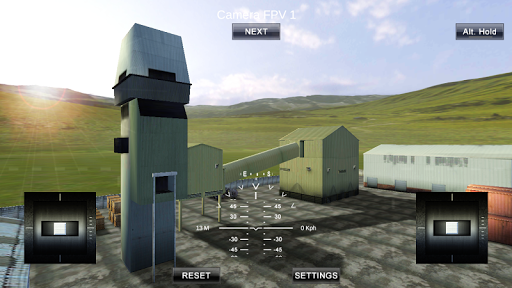
* पहला व्यक्ति कैमरा देखें
* स्थिर जिम्बल कैमरा
* कैमरा का पालन करें
आप उड़ते समय चारों ओर घूम सकते हैं, या तो स्क्रीन के बीच को खींचकर या सक्षम करके कर सकते हैं आंखों के स्तर के कैमरे मोड में बाईं ओर एक्सेलेरोमीटर बटन ..
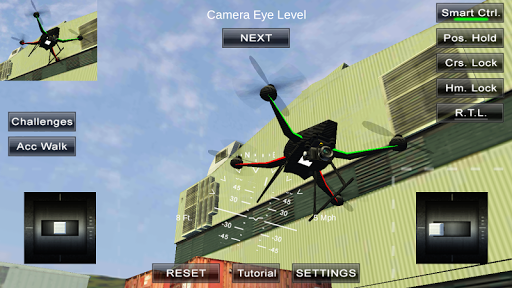
3) स्थान पर लौटें (आरटीएल)
जब क्वाड पर स्वचालित रूप से वापस आ जाएगा और अपनी लैंडिंग स्थिति में वापस आ जाएगा। यह स्वचालित रूप से चालू हो जाएगा जब क्वाड सीमा से बाहर हो जाए।
4) स्थिति होल्ड करें जब क्वाड पर क्वाड पर अपनी स्थिति को पकड़ने की कोशिश की जाएगी जब दोनों नियंत्रण छड़ें जारी की जाती हैं।
5 ) कोर्स लॉक
जब आगे, पिछड़ा, बाएं और दाएं क्वाड के अभिविन्यास के बावजूद समान रहेगा। उदा। राइट स्टिक फॉरवर्ड को आगे बढ़ाना हमेशा पूर्व दिशा में आगे बढ़ेगा, भले ही यह उत्तर की ओर इशारा करता हो।
6) होम लॉक
जब आगे हमेशा से दूर रहेंगे और पीछे की ओर रहेगा आप quads अभिविन्यास के बावज परवाह किए बिना।
7) हेड अप डिस्प्ले (एचयूडी)
रीयल-टाइम पिच, रोल, हेडिंग, ऊंचाई और गति प्रदर्शित करना।
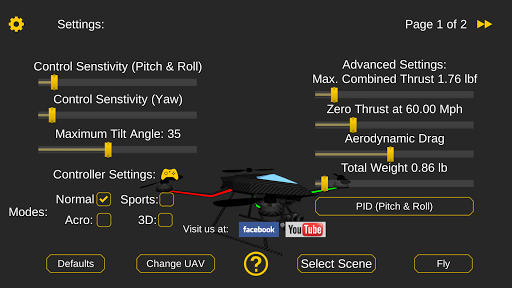
8) समायोज्य नियंत्रण संवेदनशीलता सेटिंग्स
9) ऑटो स्थिर समायोज्य
10) ऊंचाई होल्ड स्विच
अगर क्वाड पर स्विच किया गया तो ऊंचाई को बनाए रखने की कोशिश करेगा।
11) उन्नत सेटिंग्स
यदि सक्षम उपयोगकर्ता कुल वजन, स्थिर / गतिशील जोर, पीआईडी सेटिंग और वायुगतिकीय ड्रैग मान बदल सकते हैं।
12) एकाधिक क्वाड / दृश्य चयन / कुछ बुनियादी टाइम पास के लिए चुनौतियां ..
13) एकाधिक मोड इनपुट समर्थन।
अब यह मोड 1, मोड 2 का समर्थन करता है। मोड 3, मोड 4 और एक्सेलेरोमीटर। आप सेटिंग्स पृष्ठ के माध्यम से बदल सकते हैं
14) एफपीवी और जिम्बल कैमरा में कैमरा रोटेशन।
एफपीवी या जिम्बल कैमरे पर स्क्रीन के केंद्र से क्लिक करें और खींचें। रीसेट करने के लिए केंद्र में डबल क्लिक करें।
15) गतिशील हवा
इमारत के पीछे हवा प्रभाव कम हो जाएगा।
16) इमर्सिव आभासी वास्तविकता और एफपीवी अनुभव के लिए Google कार्डबोर्ड समर्थन।
सुनिश्चित करें कि आपके पास एक है डिवाइस से जुड़ी नियंत्रक क्योंकि कार्डबोर्ड वीआर सक्षम होने के बाद क्वाडकोप्टर को नियंत्रित करने का एकमात्र तरीका नियंत्रक द्वारा होता है। सक्षम करने के बाद आपको यूआई पर बटन पर टकटकी लगाना होगा और इसे क्लिक करने के लिए कार्डबोर्ड पर ट्रिगर बटन दबाएं। एक बार जब आप उड़ते हैं तो ट्रिगर को कहीं भी दबाकर सेटिंग पृष्ठ खुल जाएगा। ट्रिगर बटन दबाए जाने के बजाय ट्रिगर ईवेंट को निष्पादित करने के लिए कहीं भी स्क्रीन पर स्पर्श कर सकते हैं।
17) अधिकतम टिल्ट कोण / ऑटो संवेदनशीलता स्लाइडर को स्थिर करता है
सामान्य मोड में स्लाइडर अधिकतम झुकाव कोण सेटिंग बदलता है। यह सेटिंग्स निर्धारित करती है कि अधिकतम रोल / पिच कोण क्वाडकोप्टर झुकाएगा। खेल मोड में यह ऑटो स्थिर संवेदनशीलता को बदलता है। सेटिंग्स को उच्च बल को क्वाडकोप्टर को स्थिर करने के लिए अधिक बल लागू किया जाता है।
18) विशेषज्ञ उड़ान के लिए एक्रो / एक्रो 3 डी मोड
ऑटो स्थिरता इन तरीकों से लागू नहीं किया जाएगा। आपको इस मोड में उड़ान भरने के लिए विशेषज्ञ होने की आवश्यकता है। 3 डी मोड मोड है जिसमें क्वाडकोप्टर भी उल्टा उड़ सकता है। थ्रॉटल की छड़ें केंद्र की स्थिति से नीचे चले जाने पर रिवर्स थ्रस्ट का उत्पादन करेगी।
उड़ने का आनंद लें ..
क्रेडिट: कुछ धमनी सामग्री उपयोग में है।





9Apps 4.9














