
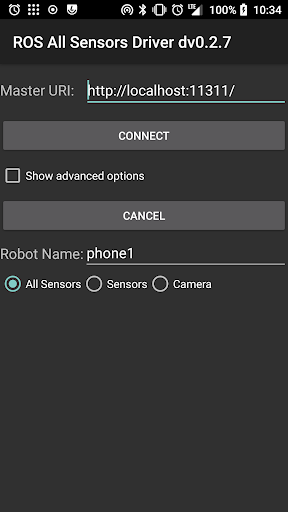
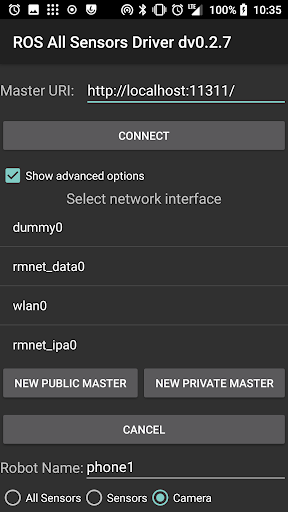
Envíe los datos de los sensores de teléfono / tableta sobre ROS
¡Ya no requiere OPENCV Manager!
Establezca la variable de entorno ROS_IP en la computadora con la computadora IP antes de ejecutar ROSCORE en la computadora.
Si el teléfono está conectado y No puede recibir mensajes desde el teléfono, intente conectar la computadora a WiFi del hotspot del teléfono. (No es la misma red wifi con su propio enrutador).
wiki
v0.2.8
- Retire el botón QR.
v0.2.7
- Agregar soporte 64bit para nuevos teléfonos y tabletas.
- Ya no requiere OpenCV Manager.
- Pedir permisos para cámara y GPS.
V0 .2.6
- Corregir el error de imagen en bruto: Excaption fuera de la memoria en ninguna compresión.
Ahora puede elegir ninguna compresión con cualquier color y cualquier cámara.
V0.2.5
- Añadir una Número de versión al nombre del título de la aplicación.
V0.2.4
- Agregar soporte en tabletas.
- Añadir documento. (Aquí y Wiki Page.)
V0.2.3
- Fix Bug: Dos o más teléfonos no podían transmitir datos en la misma red Roscore - (incluso con un nombre diferente)
V0 .2.2
- Fusionar la cámara y el controlador del sensor.
- Actualizar la marco de OpenCV. (Ahora trabaje en cualquier dispositivo.)
- Admite el dispositivo antiguo también: Android 10 API y arriba.
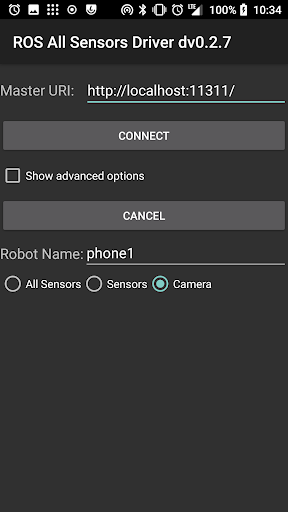
- Agregar nombre de robot a ui.
- Agregar botón de radio para elegir qué sensores transmitirán.
- Organiza y rediseñan el código.
- Trabaja más rápido.
9Apps 4.9