







প্রথম ব্যক্তি দেখুন (এফপিভি), HUD, হোম লক, কোর্স লক, হোম লক, ক্যামেরা জিম্বল, এসিআরও মোড, অ্যাক্রো 3 ডি মোড এবং আরো অনেক কিছু সঙ্গে একটি QuadCopter / Multirotor RC ড্রোন সিমুলেটর ..
এখন গুগল পিচবোর্ড ভিআর এছাড়াও immersive উড়ন্ত এবং fpv অভিজ্ঞতা জন্য সমর্থিত।
কন্ট্রোলারদের জন্য সমর্থন
এটি আমাদের quadcopterfx সিমুলেটরের একটি প্রো সংস্করণ। কোন ইন-ইনপ্যাপ ক্রয় আছে। সবকিছু অনেক কম খরচে সক্রিয় করা হয়। প্রথমবার ব্যবহারকারীরা আমাদের বিনামূল্যে quadcopter FX সিমুলেটরটি দেখতে চেষ্টা করতে পারেন কিনা তা দেখতে প্রতিটি জিনিস ভাল কাজ করে কিনা।
https://play.google.com/store/apps/details?id=com.creativeworld.quadcopterfx
সর্বনিম্ন স্ক্রিন রেজোলিউশন 800 x 480 PX প্রয়োজন। সর্বনিম্ন প্রস্তাবিত RAM 1 জিবি যদিও আমরা এটি সফলভাবে 512 এমবি র্যামে চলতে দেখেছি। আমরা পরামর্শ এবং সমস্যা খোলা আছে। আপনি সবসময় আমাদের সহায়তা ইমেইল এ আমাদের ইমেল করতে পারেন।
বৈশিষ্ট্য:
1) QuadCopter এর আসল পদার্থবিজ্ঞান মডেলের উপর ভিত্তি করে
2) বিভিন্ন ক্যামেরাস মোডের ইন্টারেক্টিভ নির্বাচন:
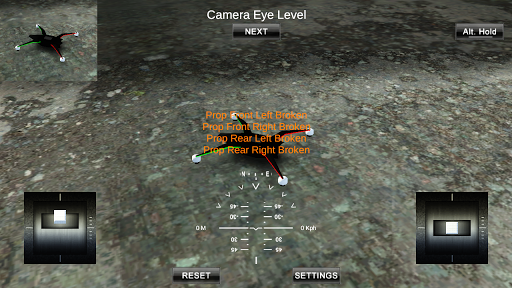
* চোখের স্তরের ক্যামেরা
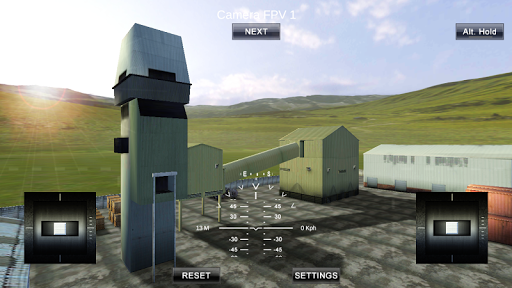
* প্রথম ব্যক্তি দেখুন ক্যামেরা
* স্থিতিশীল জিম্বাল ক্যামেরা
* অনুসরণ করুন ক্যামেরা অনুসরণ করুন
আপনি ফ্লাইংয়ের সময় হাঁটতে পারেন, স্ক্রিনের মাঝখানে টেনে আনতে বা সক্ষম করে চোখের স্তরের ক্যামেরা মোডে বাম দিকে অ্যাক্সিলেরোমিটার বোতাম ..
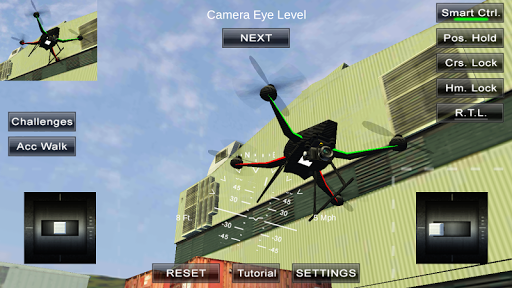
3) অবস্থানটিতে ফিরে যান (RTL)
যখন চতুর্ভুজটি স্বয়ংক্রিয়ভাবে ফিরে আসবে এবং তার ল্যান্ডিং পজিশনে ফিরে আসবে। চতুর্ভুজ পরিসরের বাইরে চলে যাওয়ার সময় এটি স্বয়ংক্রিয়ভাবে স্যুইচ করবে।
4) অবস্থান হোল্ড
যখন ক্লাউডে উভয় নিয়ন্ত্রণ লাঠিগুলি মুক্তি পায় তখন তার অবস্থানটি ধরে রাখতে চেষ্টা করবে।
5 ) কোর্স লক
যখন এগিয়ে, পশ্চাদপসরণ, বাম এবং ডানদিকে চতুর্ভুজ অভিযোজন নির্বিশেষে একই থাকবে। E.G. ডান লাঠিটি এগিয়ে যাচ্ছেন সর্বদা পূর্ব দিকের দিকে অগ্রসর হবে এমনকি যদি তার উত্তর দিকে ইঙ্গিত দেয়।
6) হোম লক
যখন এগিয়ে আপনার কাছ থেকে সর্বদা দূরে থাকবে এবং পিছনে থাকবে আপনি quads অভিযোজন নির্বিশেষে নির্বিশেষে।
7) হেড আপ প্রদর্শন (HUD)
রিয়েল-টাইম পিচ, রোল, শিরোনাম, উচ্চতা এবং গতি প্রদর্শন করা হচ্ছে।
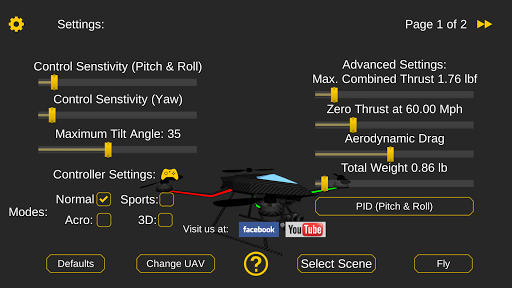
8) স্থায়ী কন্ট্রোল সংবেদনশীলতা সেটিংস BR>
9) স্বয়ংক্রিয় স্থিতিশীল স্থায়ী
10) উচ্চতা হোল্ড স্যুইচ
যদি চতুর্ভুজটি স্যুইচ করার সময় উচ্চতা বজায় রাখার চেষ্টা করবে।
11) উন্নত সেটিংস
যদি সক্ষম ব্যবহারকারীরা মোট ওজন, স্ট্যাটিক / ডায়নামিক থ্রাস্ট, পিআইডি সেটিং এবং এয়ারোডাইনামিক টেনে আনতে পারে।
12) একাধিক চতুর্ভুজ / দৃশ্য নির্বাচন / কিছু মৌলিক সময় পাসের জন্য চ্যালেঞ্জ ..
13) একাধিক মোড ইনপুট সমর্থন।
এখন এটি mode1, মোড 2 সমর্থন করে। মোড 3, মোড 4 এবং অ্যাক্সিলেরোমিটার। আপনি সেটিংস পৃষ্ঠার মাধ্যমে পরিবর্তন করতে পারেন
14) FPV এবং জিম্বল ক্যামেরাতে ক্যামেরা ঘূর্ণন।
FPV বা জিম্বল ক্যামেরাতে স্ক্রিনের কেন্দ্র থেকে টেনে আনুন এবং টেনে আনুন। ডাবল ক্লিক সেন্টারে ডাবল ক্লিক করুন।
15) ডাইনামিক বায়ু
বিল্ডিংয়ের পিছনে বাতাসের প্রভাব হ্রাস পাবে।
16) নিমজ্জনযোগ্য ভার্চুয়াল বাস্তবতা এবং FPV অভিজ্ঞতার জন্য Google পিচবোর্ড সমর্থন।
আপনার কাছে আছে তা নিশ্চিত করুন ডিভাইসের সাথে সংযুক্ত কন্ট্রোলারটি কার্টবোর্ড ভিআর সক্ষম হওয়ার পরে আপনি কাদপ্টারটি নিয়ন্ত্রণ করতে পারেন এমন একমাত্র উপায় কন্ট্রোলার দ্বারা। সক্ষম করার পরে আপনাকে ইউআই-তে বোতামগুলিতে নজর রাখতে হবে এবং এটি ক্লিক করতে পিচবোর্ডে ট্রিগার বোতাম টিপুন। একবার আপনি উড়ন্ত হয়ে গেলে ট্রিগারটি কোথাও সেটিংস পৃষ্ঠাটি খুলবে। আপনি ট্রিগার বোতাম টিপে ট্রিগার ইভেন্টটি চালানোর জন্য কোথাও স্ক্রীনে স্পর্শ করতে পারেন।
17) সর্বোচ্চ ঢালাই কোণ / অটো স্থিতিশীল সংবেদনশীলতা স্লাইডার
সাধারণ মোডে সর্বাধিক ঢালাই কোণ সেটিং পরিবর্তন করে। এই সেটিংস সর্বাধিক রোল / পিচ কোণ নির্ধারণ করে QuadCopter টিল হবে। ক্রীড়া মোডে এটি স্বয়ংক্রিয় স্থিতিশীল সংবেদনশীলতা পরিবর্তন করে। উচ্চতর সেটিংস quadcopter স্থিতিশীল করার জন্য আরো বল প্রয়োগ করা হয়।
18) বিশেষজ্ঞ উড়ন্ত জন্য ACRO / ACRO 3D মোড
এই মোডে অটো স্থিতিশীলতা প্রয়োগ করা হবে না। আপনি এই মোডে উড়ে যাওয়ার জন্য বিশেষজ্ঞ হতে হবে। 3D মোড মোড যা QuadCopter এছাড়াও ঊর্ধ্বগামী উড়ে যেতে পারে। কেন্দ্র অবস্থান থেকে সরানো যখন থ্রোটল লাঠি বিপরীত চাপ উত্পাদন করবে।
উড়ন্ত উপভোগ করুন ..
ক্রেডিট: কিছু অ্যাস্টারিয়া কন্টেন্ট ব্যবহার করা হয়।
9Apps 4.9




















