
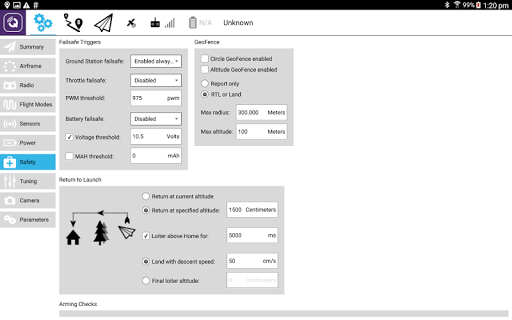
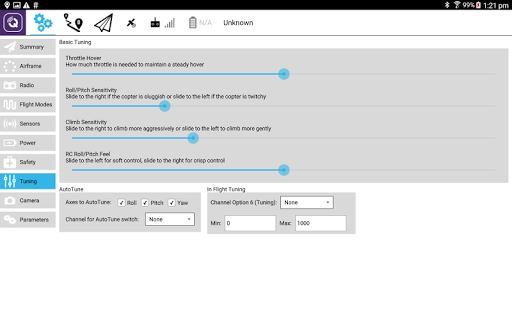
Qgroundcontrol ให้การควบคุมการบินเต็มรูปแบบและการกำหนดค่าสำหรับยานพาหนะที่ขับเคลื่อนด้วย ARDUPILOT หรือ PX4 PRO เป้าหมายสำหรับ QgroundControl ได้รับการปรับปรุงให้ใช้งานง่ายสำหรับผู้ใช้ใหม่รวมถึงการสนับสนุนคุณสมบัติระดับไฮเอนด์สำหรับผู้ใช้ที่มีประสบการณ์
คุณสมบัติของ Qroundhcontrol:
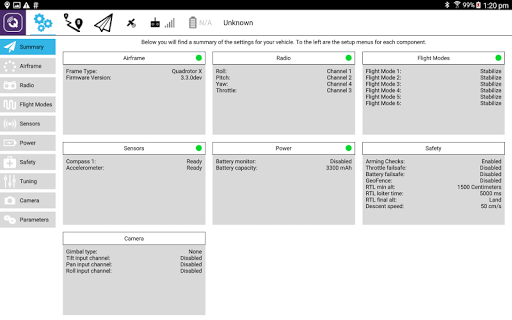
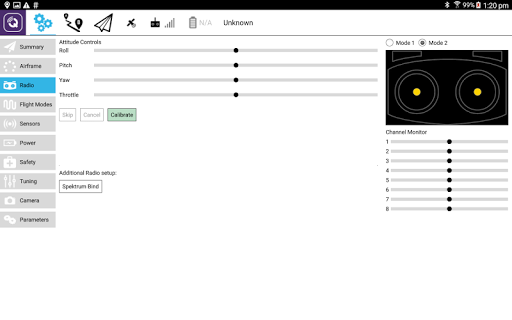
- การสนับสนุนการกำหนดค่าแบบเต็มสำหรับยานพาหนะที่ใช้ PX4 Pro และ Ardupilot (Arducopter, Arduplane, Ardurover, Ardusub) เฟิร์มแวร์
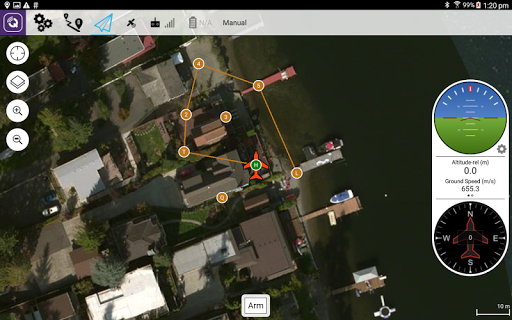
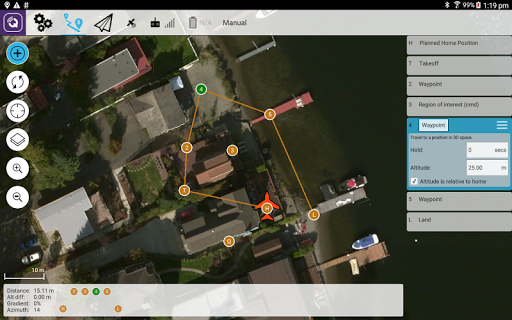
- การวางแผนภารกิจสำหรับการบินอัตโนมัติ - การแสดงแผนที่การบินแสดง ตำแหน่งยานพาหนะ, แทร็กเที่ยวบิน, จุดอ้างอิงและเครื่องมือยานพาหนะ
- วิดีโอสตรีมมิ่งด้วยการซ้อนทับจอแสดงผลของเครื่องมือ - การสนับสนุนเที่ยวบินสำหรับยานพาหนะที่มีความสามารถในการเดินทางของ Mavlink
qgroundcontrol นอกจากนี้ยังมีสำหรับ Windows, MacOS, Linux และ iOS
โน้ตที่วางจำหน่าย
เอกสาร
รองรับ





9Apps 4.9















