การควบคุม FOC Field Oriented Of IM ช่วยให้นักเรียนและครูสามารถศึกษาและทำความเข้าใจกับการควบคุมเวกเตอร์ของเครื่องเหนี่ยวนำและพฤติกรรมชั่วคราวของมันสามารถใช้งานได้หลายเหตุการณ์ในระหว่างการจำลองเช่นการเปลี่ยนแปลงในแรงบิดโหลดในเวลาที่ต่างกัน ความเร็วในการอ้างอิงและกระแสข้อมูลอ้างอิง IDSREF และ IQSREF เช่นเดียวกับการเปลี่ยนแปลงพารามิเตอร์ความต้านทาน
การจำลองสามารถแชร์และส่งออกไปยังแอปอื่น (Gmail, ภาพถ่าย, แผ่นงาน Excel, เอกสาร)
ลักษณะสำคัญ:
- การจำลองการควบคุมเวกเตอร์ของเครื่องเหนี่ยวนำ (IM), ความเร็วและการควบคุมปัจจุบัน
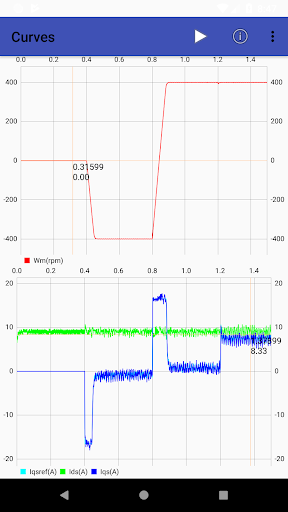
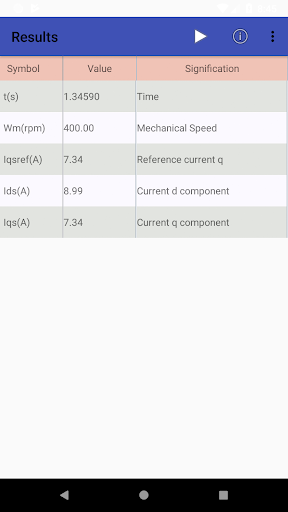
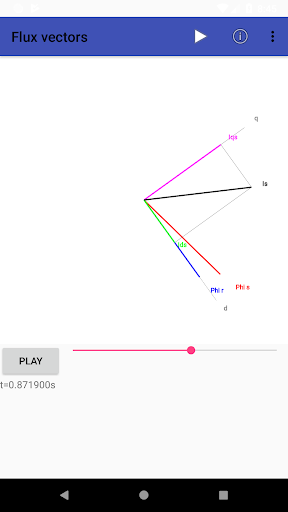
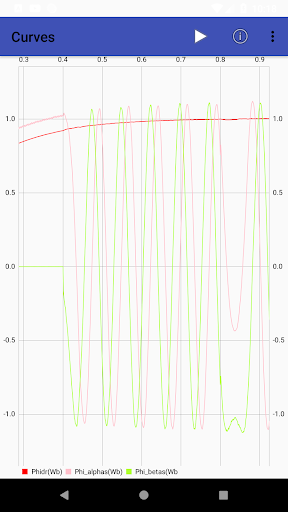
- เส้นโค้งของ IDSREF, IQSREF, IDS, IQS Currents และ VDSREF, แรงดันไฟฟ้า VQSREF, แรงบิดแม่เหล็กไฟฟ้าความเร็วโรเตอร์และสเตเตอร์ฟลักซ์ในอัลฟา -Beta เป็นฟังก์ชั่นของเวลาและในสถานะคงที่
- การประยุกต์ใช้การเปลี่ยนแปลงคลาร์กและสวนสาธารณะไปยังตัวแปรสามเฟส (แรงดันไฟฟ้าและกระแส)
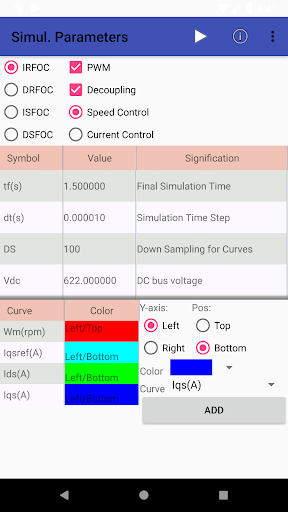
- การควบคุมเชิงพื้นที่: IRFOC, DRFOC, ISFOC, DSFOC
- การควบคุมปัจจุบัน (IDS, IQs) และการควบคุมความเร็ว - เหมาะอย่างยิ่ง อินเวอร์เตอร์ (แรงดันไซน์ไซน์) หรือ PWM 2 ระดับ (การปรับความกว้างพัลส์)
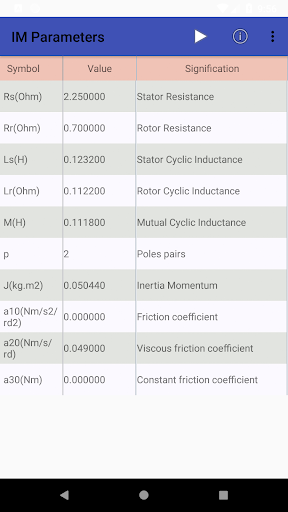
- เปลี่ยนพารามิเตอร์มอเตอร์และบันทึกในไฟล์โลคัล
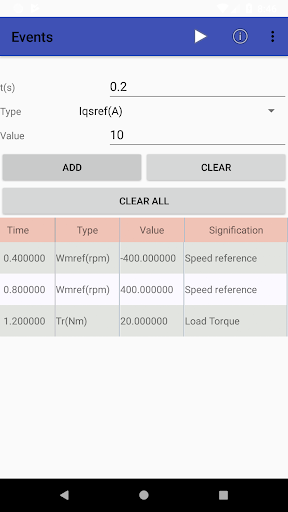
- ใช้เหตุการณ์แรงบิดโหลดหลายตัวอ้างอิงความเร็ว ... ในการจำลอง
- พารามิเตอร์การจำลอง (ครั้งสุดท้ายเวลาขั้นตอน ... )
- แสดงเส้นโค้งโดยแยกหน้าต่างออกเป็น 2 กราฟด้วยการซูมและแสดงค่าบนจุดโค้ง
กิจกรรมเพิ่มเติม (การอ้างอิงความเร็ว WMREF, IDSREF, IQSREF, สเตเตอร์และโรเตอร์ความต้านทาน) แทนที่จะเป็นเพียงการโหลดเหตุการณ์แรงบิดเท่านั้น - แสดงอินฟินิตี้ของเส้นโค้งบนกราฟ 2 ที่มีการเลือกสีตำแหน่งด้านบน / ด้านล่างและหลักหรือ แกน y รองของกราฟ จำกัด เพียง 3 เส้นโค้งในรุ่นพื้นฐาน
- โหลดการกำหนดค่าที่บันทึกไว้ก่อนหน้านี้และแบ่งปันทางอีเมล
- ข้อมูลการส่งออก: กราฟกราฟ, ข้อมูลกราฟ (XLS / CSV), พารามิเตอร์เครื่อง
และ แน่นอนคุณช่วยผู้พัฒนาซึ่งเป็นครูและนักวิจัยด้านวิศวกรรมไฟฟ้าในแนวทางของเขาในการพัฒนาแอพการศึกษา
V1.13, adapted to AndroidX





9Apps 4.9














