
Não mais ativamente mantido.
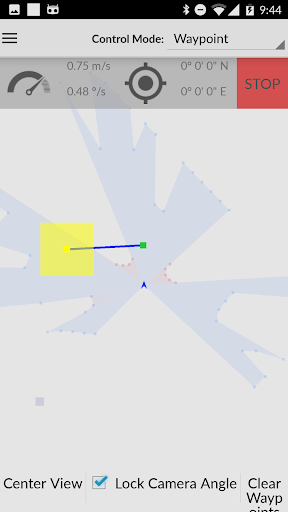
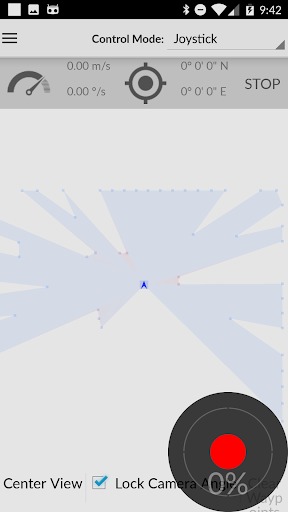
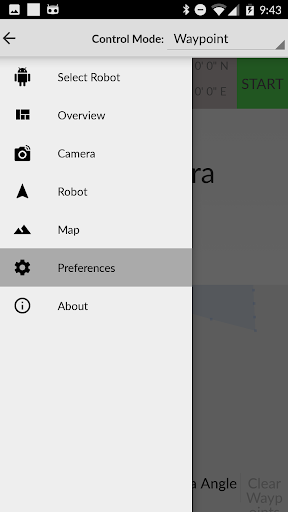
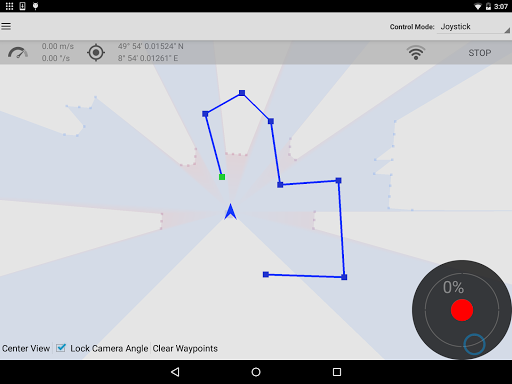
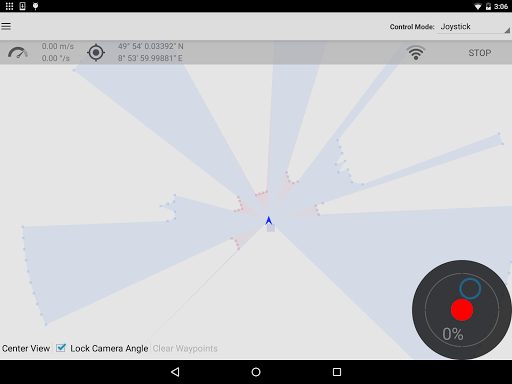
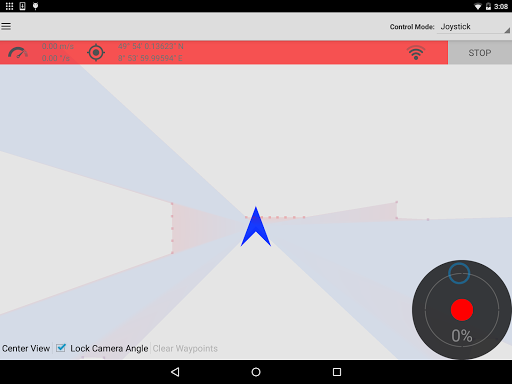
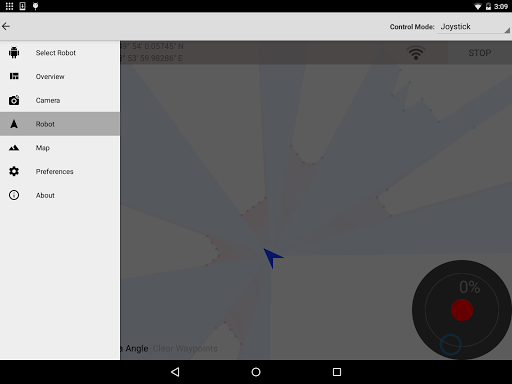
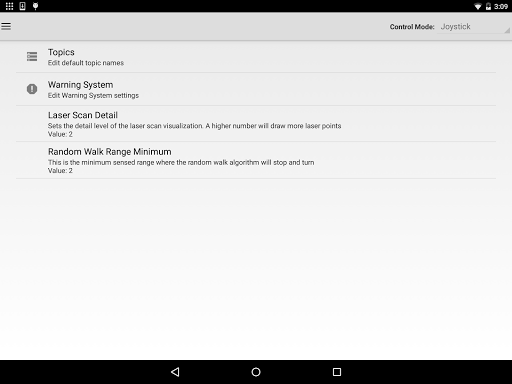
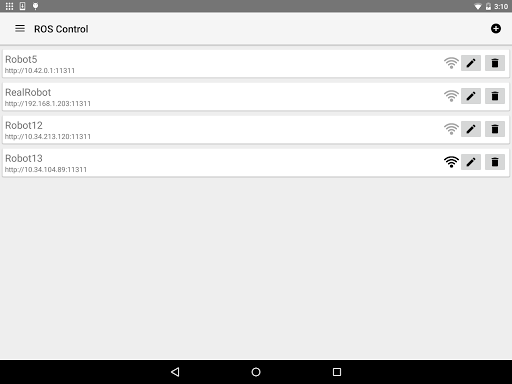
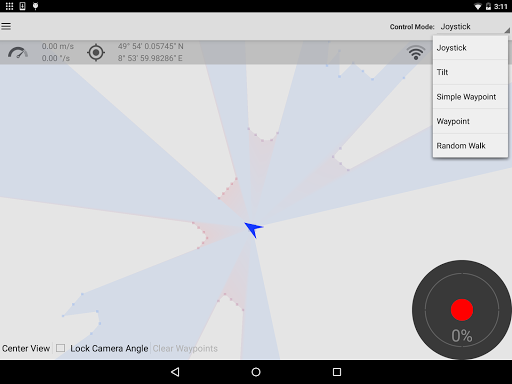
controle remoto, comando e visualizar dados do sensor em tempo real de robôs móveis em execução no sistema operacional do robô (ROS) usando o controle de Ros.- Múltiplas Opções de Controle de Teleoperação, incluindo Joystick e Tilt Control
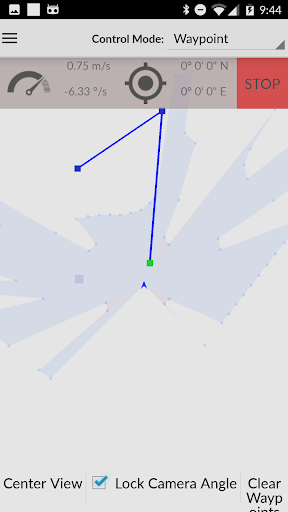
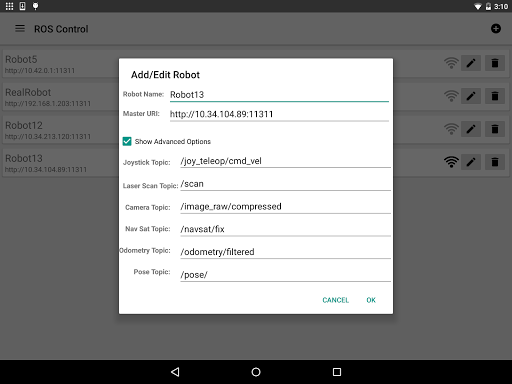
- Planejamento de Waypoint e navegação
- Vista de câmera remota
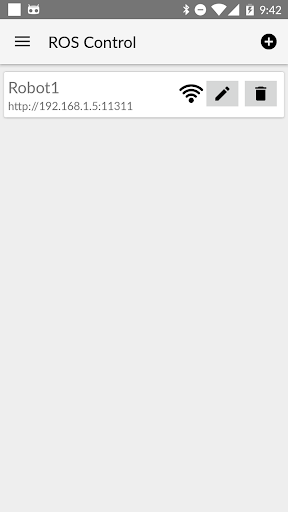
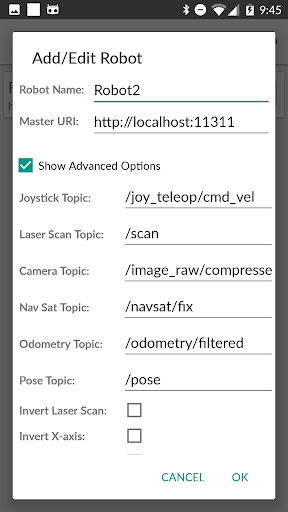
- Visualização de varredura a laser - Dados de GPS e visualização de mapa - Configuração de conexão salvaguávelPara máxima compatibilidade entre robôs de
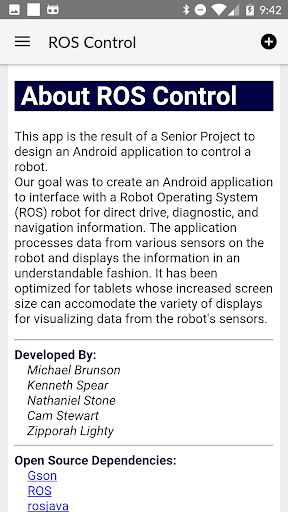
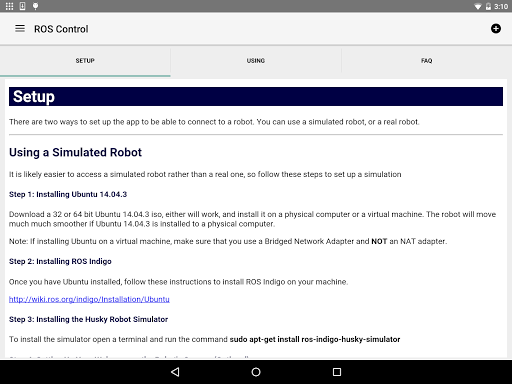
Para Desenvolvedores:
Sinta-se livre para contribuir para este aplicativo!
Código-fonte:
https://github.com/mtbii/robotca
9Apps 4.9




















