
Qgroundcontrol fornisce il pieno controllo dei voli e la configurazione per i veicoli alimentati Ardupilot o PX4 Pro. L'obiettivo di QgroundControl è migliorato la facilità d'uso per i nuovi utenti e il supporto delle caratteristiche di alto livello per gli utenti esperti.
QdcturingControl Caratteristiche:
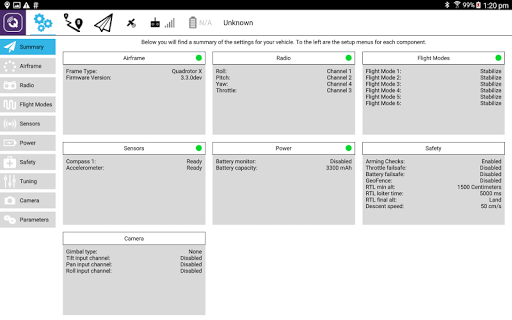
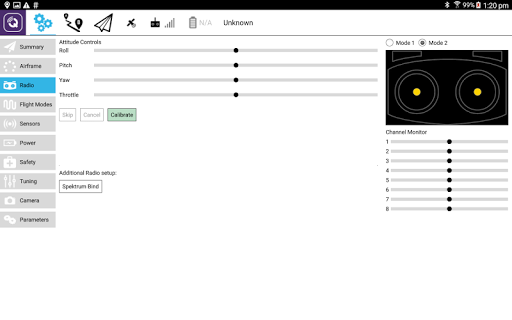
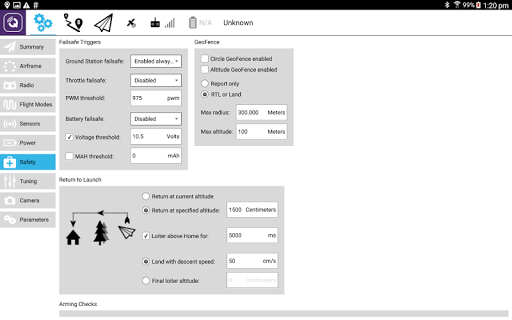
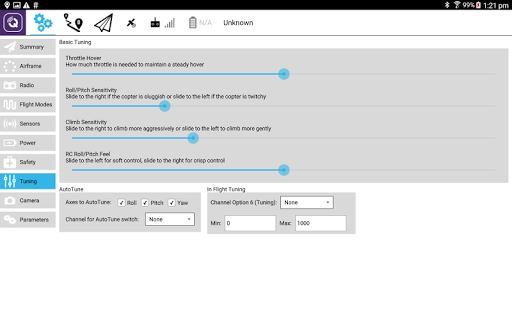
- Configurazione completa Supporto per veicoli in esecuzione PX4 Pro e Ardupilot (Arducottero, Arduplane, Ardurover, Ardulusub) Firmware
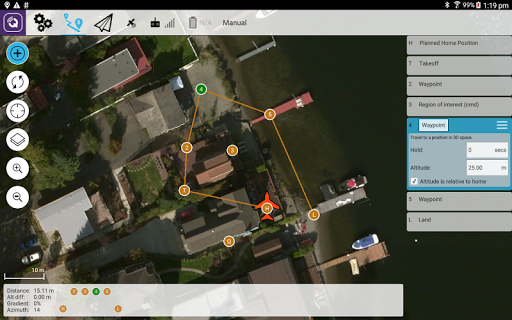
- Mission Planning for Autonomous Volo
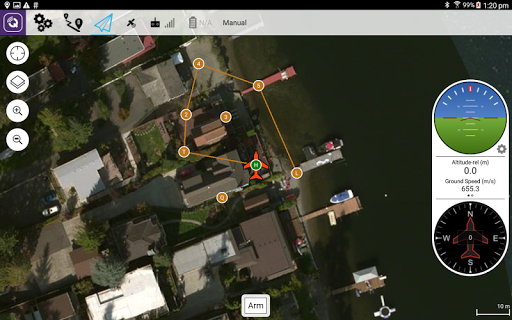
- Volo Posizione del veicolo, pista di volo, waypoint e strumenti per veicoli
- Video Streaming con display di visualizzazione dello strumento
- Supporto volo per qualsiasi veicolo capable di Mavlink
QgroundControl è disponibile anche per Windows, MacOS, Linux e IOS.
Note di rilascio
Qdctorcontrol Sito ufficiale
Documentazione
< A href = "http://www.google.com/url?q=http%3a%2f%2fdiscuss.px4.io%2fc%2fqgroundcontrol&sa=d&sntz=1&usg=afqjcngkc4svzydtxzqbw7agxmp8vfbkgxmp8vfbkugxmpl8vfbkugxmpl8vfbkugkmps





9Apps 4.9














