

Rocket signifie "Technologie d'activation de la clé à commande à distance"
Rocket est une application de contrôle à distance personnalisable destinée principalement pour les projets de loisirs électroniques.
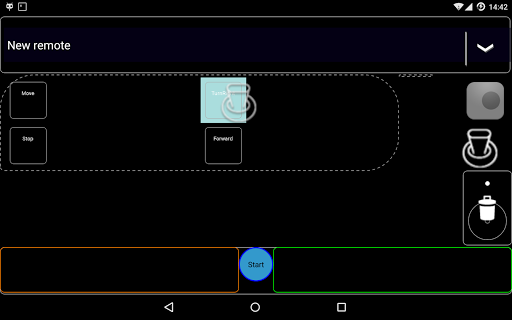
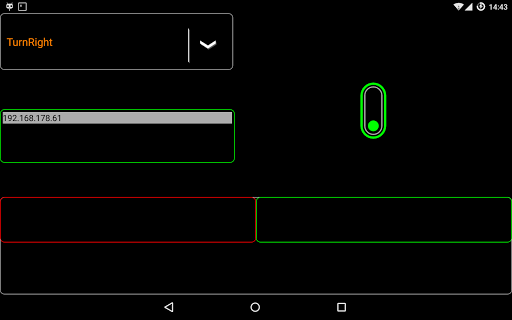
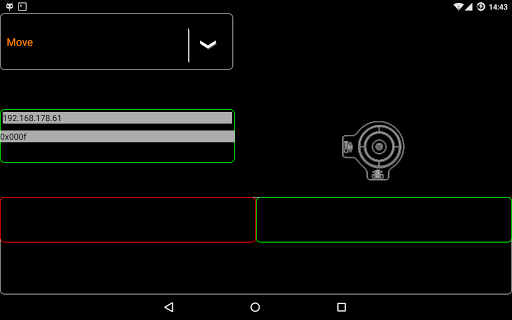
Rocket Connecte la télécommande 2 roues motrices via WiFi (TCP) . Le réseau peut être en mode AP ou en mode STA. À l'aide de l'application, vous pouvez contrôler toutes les directions de déplacement et servos de bras et d'outils. En mode STA, votre objectif de passe-temps est un véritable internet de tout dispositif et peut être contrôlé à distance à distance de WAN et LAN.
Toutes les commandes Envoyer de la fusée sont des chaînes de texte, se terminant par la commande finissant CR (retour chariot), ASCII 13 QUI EST CODE HEX 0x4.
Tous les ajustements requis et les interprétations de commandes sont stockés et effectués à Python.
Vous devrez probablement adapter la fusée pour répondre aux exigences de votre projet Hobby. Dans ce cas, vous aurez besoin de connaissances en python concernant l'adaptation du module de scénario et de conversion de direction.
Bundling webiopi en tant que composant de base applique l'utilisation de la Raspberry Pi Zero, 2 ou 3.
dans General Rocket dépend, demande et utilise le serveur WebIOPI sur côté cible. Chaque bouton de l'écran d'application utilise des macros WebIOPI pour réaliser la fonctionnalité.
Ces macros sont des fonctions Pythons personnalisées automatiquement liées à l'API de repos, de sorte qu'ils sont appelables à distance. Ils permettent de déclencher à distance le calcul complexe sur le PI de framboise ou des événements manuels, déclencher plusieurs GPIO à la fois ou même de modification des paramètres de périphérique.
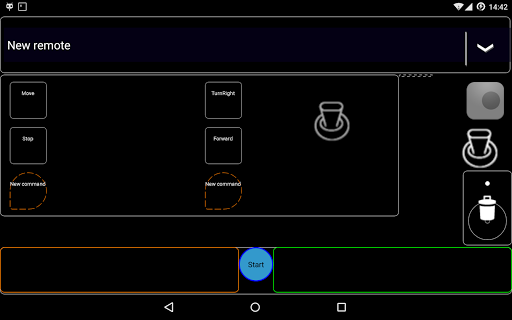
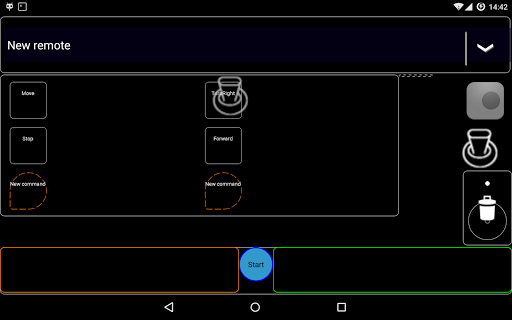
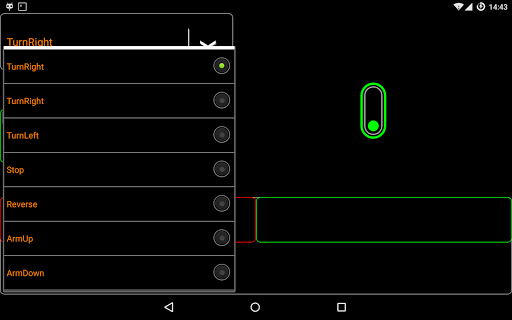
Dans la version initiale actuelle, la fusée interface utilisateur est limitée à la plage codée dure de 11 @ webiopi.macro Appels:
Forward (), TurnLetft (), Reverse (), Turright (), Arrêt (), Armdown (), Tiltup (), Tiltup (), TilTown (), Flashall (), Déplacer (G / D).





9Apps 4.9











